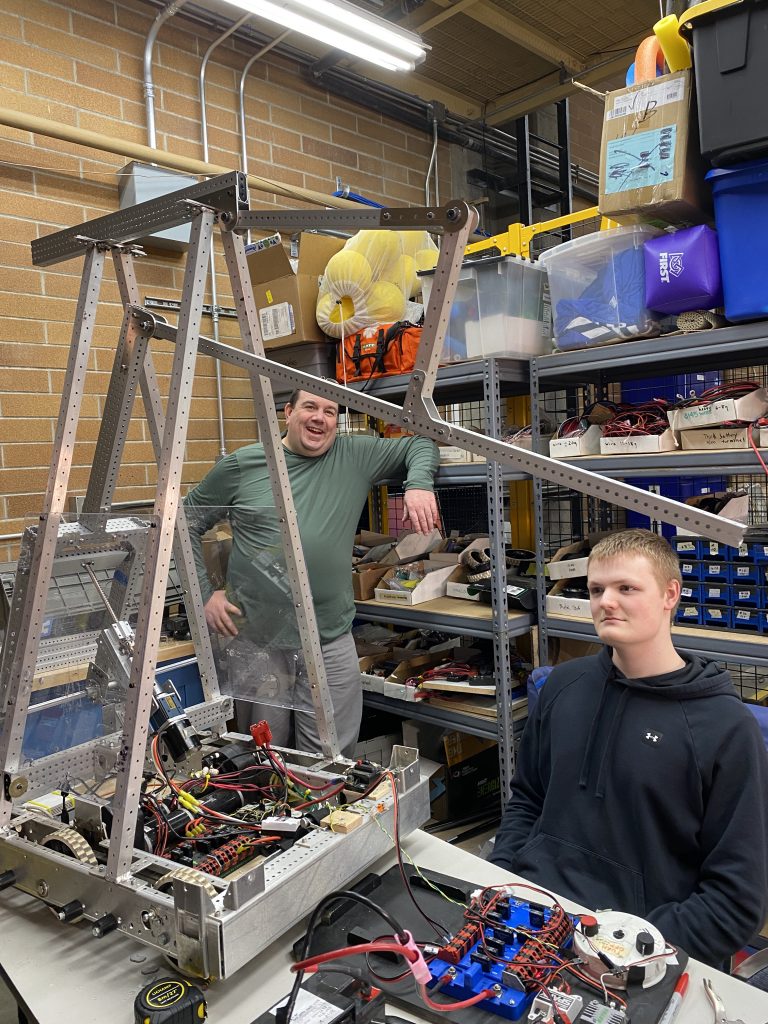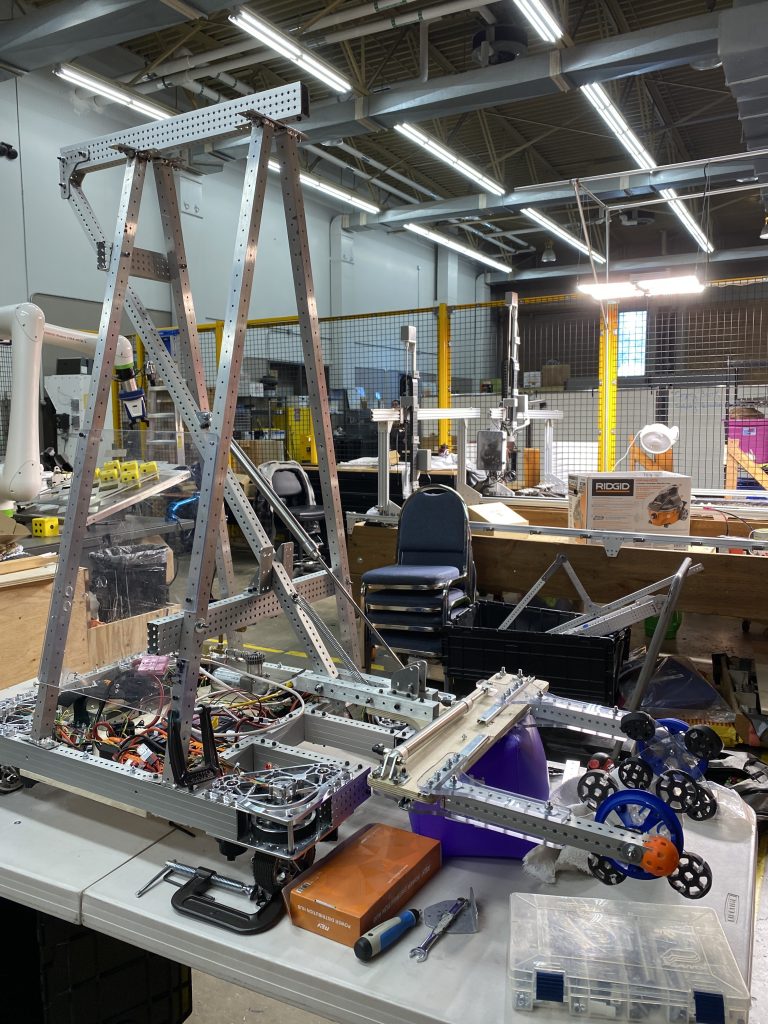
Arm + Wrist Update
At the moment, we are not going to have enough time to put the kinematic arm onto our robot before Utah Regionals. So instead, we had to quickly build a still-arm that drops the wrist using pneumatics along with the gripper. Hopefully for the Idaho Regionals we have the full arm!